- Date
- August 6, 2019
Are you interested in taking your first steps in robotics? Do you seek a practical approach and want to learn by doing? Join our course and learn how to program a complete real-world robotic system with ROS! The Robot Operating System (ROS) enables you to quickly build robotic applications through access to a large set of open-source software and tools. Over the years, ROS has become the essential tool for roboticists. A large community surrounds ROS and there has been extensive input from industrial users in the development of these tools. Many of the new advanced robot capabilities for manipulation, perception, and navigation have been developed using ROS. Companies such as Airbus and Boeing are using ROS for several of their applications. And Delft University of Technology’s Team Delft Robotic System won two challenges at the Amazon Robotics Challenge 2016 with robots developed with ROS. In this course, you will learn to use different ROS tools to create a complete robotic application. You will be working with your own standalone Ubuntu-Linux installations and with industrial and mobile robots on the physics-based simulation engine, Gazebo. You will learn to program and configure basic robotic tasks such as pick-and-place objects, and navigate […]- Date
- August 6, 2019
We encourage you to engage with the ROS Quality Assurance community on ROS discourse, a dedicated place for quality assurance discussion, where we can explain, promote, develop and discuss QA practices, techniques and tools. This is for everybody, from the quality enthusiast, who cares about quality of ROS, to a community member who has a question or feedback. Here, you can get help about QA practices and processes, discuss ROS quality and contribute to ongoing ROS QA initiatives and activities, and provide feedback on the ongoing QA work. Bildquellen ROSIN_ROS-Discourse-QA: Bildrechte beim Autor- Date
- August 6, 2019
The Quality Hub is an online community hub that will provide a focal point and resources to foster quality related activity in ROS. Please help to grow it in the interest of the entire community. This page is a central entry point for all quality assurance material for ROS. This includes tutorials and patterns on producing and contributing high quality code, as well as on testing, and other quality oriented practices. The particular focus are industrial users of ROS, but everybody is welcomed to benefit and to contribute. Please create new quality oriented materials under this tree in the wiki. Inhaltsverzeichnis ROS Software Quality Hub Tutorials and articles Quality category on ROS Discourse Who is behind ROS Quality Hub? (About Us) Tutorials and articles See Quality/Tutorials for tutorials & articles on quality assurance with ROS and for ROS. Quality category on ROS Discourse There is a dedicated software quality category on ROS Discourse: discourse.ros.org/Quality. Go there to discuss issues of quality policies in the ROS projects, and in ROS-based applications, including proposals of content for this webpage, offers to help, etc. Who is behind ROS Quality Hub? (About Us) So who is behind this page? The answer is simple: It’s […]- Date
- March 3, 2019
- Website
- View website
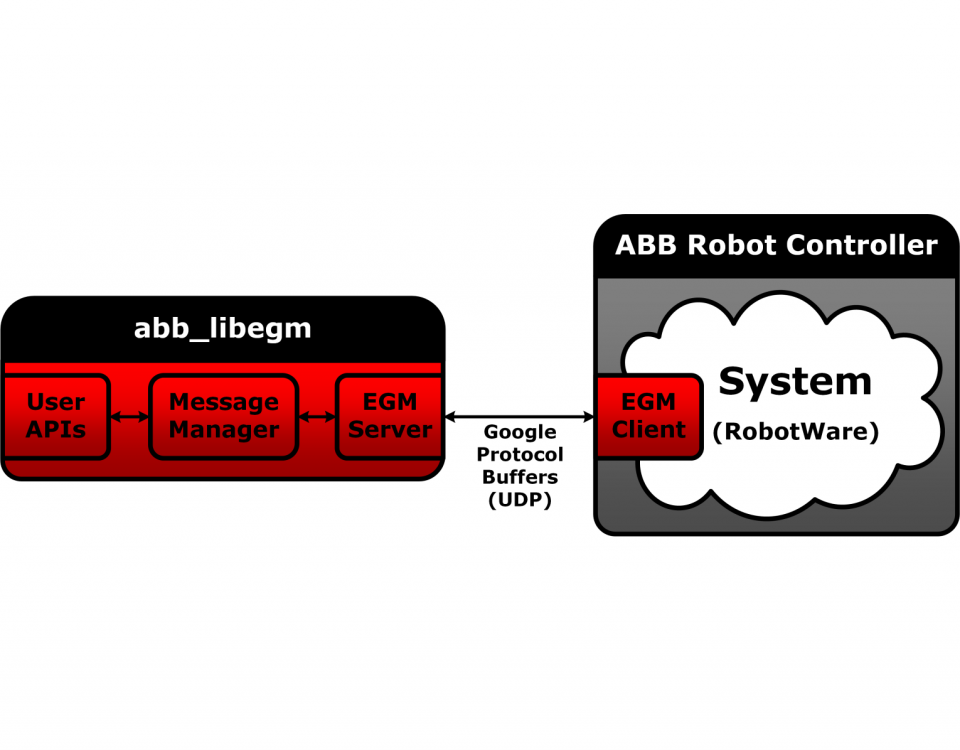
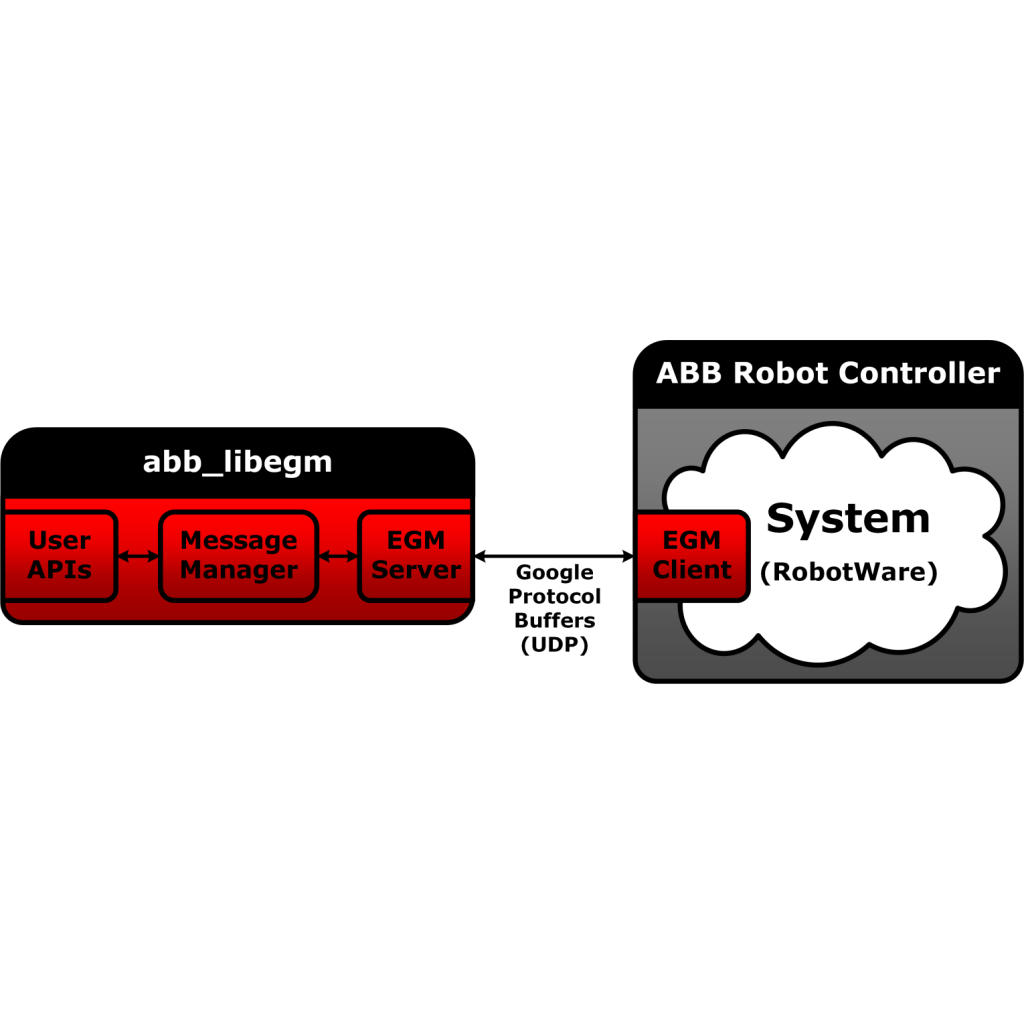
Brief Description abb_libegm is a C++ communication library for facilitating, and easing, the use of the Externally Guided Motion (EGM) interface of ABB robot controllers. In a nutshell, the library helps with setting up communication channels, parsing EGM messages, as well as providing user APIs. The library does not depend on ROS, and as such it can also be used on non-ROS systems. However, the library has been wrapped inside a ROS package for making distribution and sharing a breeze. Please visit the library’s GitHub repository for a more in-depth description of supported features, requirements and limitations. The core part of the library was developed throughout the European project SYMBIO-TIC, while the open-source process and creation of a ROS package has been performed during the ROSIN project.- Date
- March 3, 2019
- Website
- View website
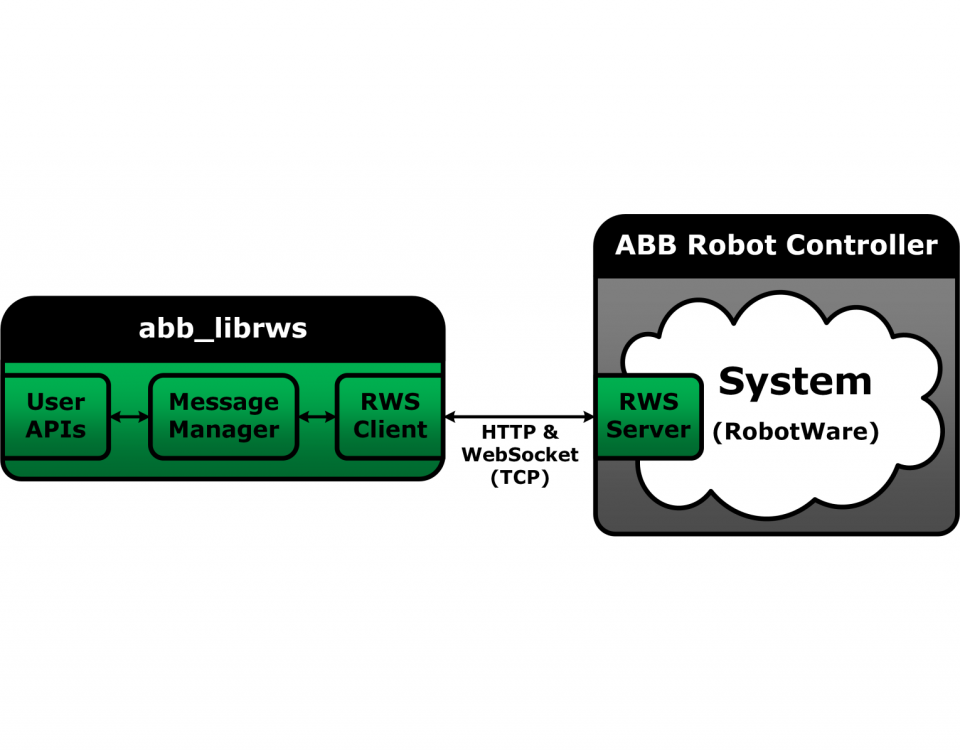
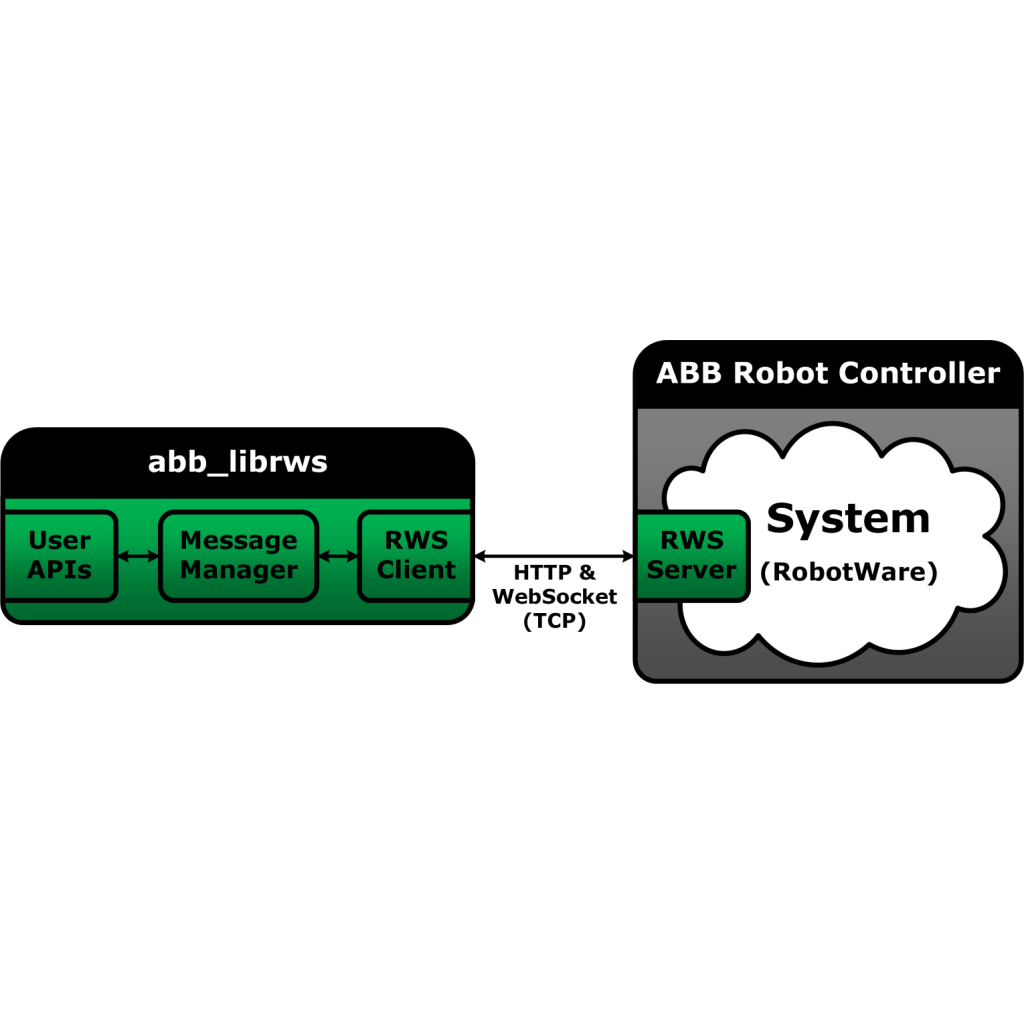
Brief Description abb_librws is a C++ communication library for facilitating, and easing, the use of the Robot Web Services (RWS) interface of ABB robot controllers. In a nutshell, the library helps with setting up communication channels, parsing RWS messages, as well as providing user APIs. The library does not depend on ROS, and as such it can also be used on non-ROS systems. However, the library has been wrapped inside a ROS package for making distribution and sharing a breeze. Please visit the library’s GitHub repository for a more in-depth description of supported features, requirements and limitations. The core part of the library was developed throughout the European project SYMBIO-TIC, while the open-source process and creation of a ROS package has been performed during the ROSIN project.- Date
- February 26, 2019
- Website
- View website
A simple bash script to generate .rosinstall files ‘from the past’. Overview This bash script is a wrapper around rosinstall_generator that accepts one additional argument: a date in the past. Using this date in the past, the script will try to generate a .rosinstall file using rosinstall_generator and the state of ros/rosdistro at the date specified. The .rosinstall file can then be used to build a set of ROS packages that will approximate the “state of ROS” as it was at the date specified. This is of course only an approximation as other parts of the technology stack (such as the OS) are not reverted. Usage and more information See the github repository for more information and precise usage instructions: rosin-project/rosinstall_generator_time_machine- Date
- February 20, 2019
- Website
- View website
>> 3D animation Application implements godel (Scan and Plan): https://github.com/ros-industrial-consortium/godel ensenso_driver: https://github.com/ensenso/ros_driver ( funded) pilz_robots: https://github.com/PilzDE/pilz_robots pilz_industrial_motion: https://github.com/PilzDE/pilz_industrial_motion ( funded)- Date
- September 6, 2018
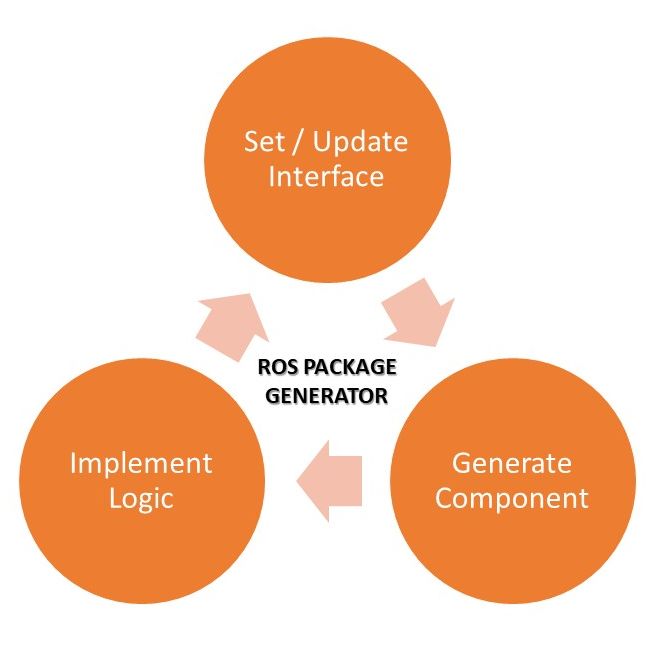
Summary What if you could avoid writing nodes from scratch every time you create a package? What if you could just create a new node by defining its interface and then have all the ROS communication primitives automatically created for you, so that you can focus on the core logic of your component? What if you could still update your interface once you have created your node? What if you could even create your own package and node template, so that you could create nodes that exactly fit your needs? Well that´s what the ROS package generator proposes! https://github.com/tecnalia-advancedmanufacturing-robotics/ros_pkg_gen Extended description The objective of this package is double. On one side, it enables a ROS user, hereafter called Developer, to create a package and its nodes automatically from the definition of the nodes interfaces. On the other side, it enables advanced users or Designers to define package and node templates, based on their expertise, requirements and best practices, so that Developers can reuse these templates to generate new packages and nodes following that model automatically. The available templates are designed to make a clear separation in between (i) the node interface implementation and management (based on ROS communication primitives, […]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Papers
Articles in (non-scientific) magazines, blog posts, interviews, podcasts, invited talks and similar
The Sustainability of Quality in Free and Open Source Software
42nd International Conference on Software Engineering Companion (ICSE '20 Companion), May 23--29, 2020, Seoul, Republic of Korea.
Author: Alami, A.
euRobotics Educational Topic Group workshop
Nicolas Limpert (FHA) presented ROSIN Education at the euRobotics Educational Topic Group workshop of ERF2020 in Malaga